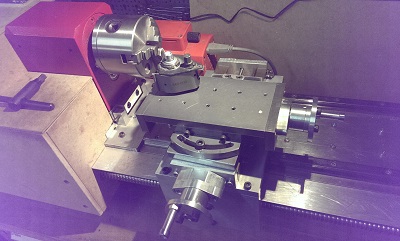
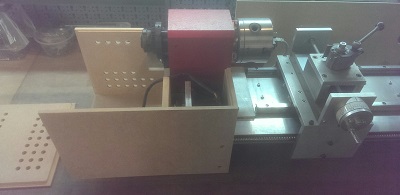
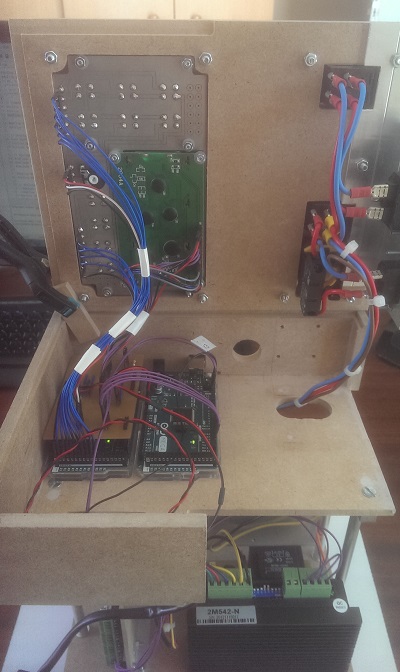
Toute la partie électronique est logée dans un boitier en mdf fixé à l’extrémité du tour, coté broche ; il abrite le bloc de puissance (alimentation, driver moteur, breackout-board), l’électronique, et les 3 platines de commande.
L’électronique de commande est constituée de 2 Arduinos mega 2560 :
– le premier est en charge de l’interface homme-machine (boutons poussoirs, afficheur lcd 4×20 caractères), de la mesure de la vitesse de rotation de la broche (grâce au capteur hall), et du calcul des paramètres de fonctionnement du moteur pas-à-pas (vitesse, accélération et sens de déplacement, nombre de pas) ; il communique avec le second arduino via une liaison Tx/Rx.
– le second Arduino reçoit ses ordres du premier ; sur la base des ordres reçus, il fabrique sous interruption les ordres “dir” et “step” à l’attention du driver du moteur ; il calcule la position résultante du chariot, et la retourne au premier Arduino, pour affichage.
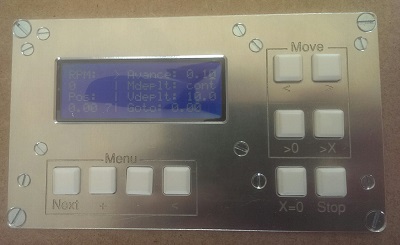
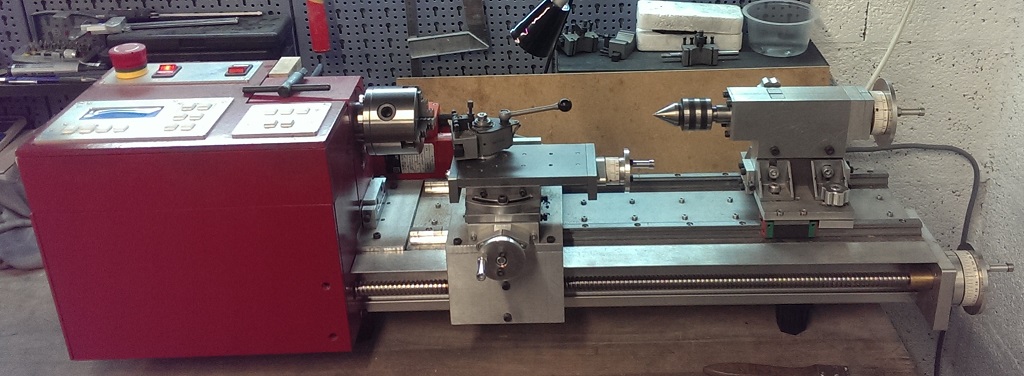
L’afficheur LCD affiche en permanence vitesse de rotation broche et position ; il dispose de 4 lignes de menu dans lesquelles on se déplace cycliquement à l’aide d’une touche “Next” ; chaque ligne permet l’ajustement d’un paramètre : “Avance par tour”, “Mode de déplacement”, “Vitesse de déplacement”, “Coordonnée cible” ; cet ajustement se fait grâce à une touche de positionnement latéral du curseur, et 2 touches + et – qui permettent de faire varier le digit sous lequel est placé le curseur (avec gestion du passage à la décade).
Un clavier de 6 touches offre les fonctions suivantes : déplacement vers la droite ou la gauche, retour à O, déplacement à la cible, remise à O, et stop.
Un second clavier à 4 touches est disponible pour des fonctions complémentaires : j’y ai mis les déplacements rapides vers la droite ou la gauche.






















superbe réalisation!
Est il possible d avoir les plans?
-provenance du moteur?
cordialement.
Bonjour,
je n’ai hélas pas de dossier de plans structuré, seulement une multitude de croquis sous Turbocad ou de fichiers d’usinages … rien de “self explanatory”.
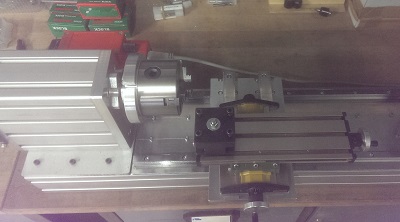
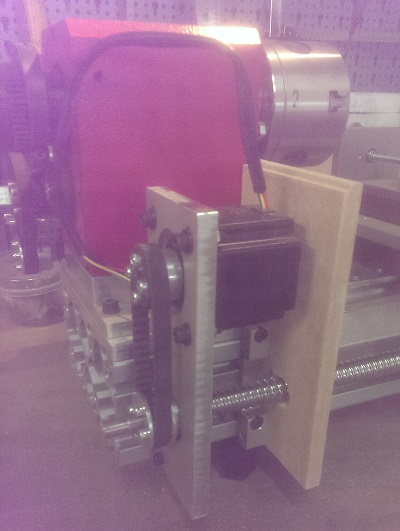
Le moteur : un bloc moteur Peugeot qui date de qques dizaines d’années ! moteur universel 600W, 2 vitesse mécaniques et variateur.
Michel