
Au plan matériel, l’adoption de composants Skalarki plug&play pour remplacer une grande partie des panels originaux induit un grand changement dans l’architecture des entrées/sorties du simu, avec la disparition d’une grosse vingtaine de cartes Open-cockpit.
Au plan des logiciels, en 9 ans, la simple évolution des logiciels se traduit également par des modifications substantielles.
1 - L'architecture des matériels :
(voir également “architecture des matériels“)
1.1 - Schéma d'ensemble :
Le cahier des charges n’a pas changé : il s’agit toujours, avec P3D, de produire 3 vues externes, face, droite et gauche, tout en maintenant un fps d’au moins 30, niveau nécessaire pour que A320 FMGS, le logiciel qui anime l’A320, fonctionne dans de bonnes conditions.
La solution retenue en version 1 donne satisfaction, du moins avec 3 vidéoprojecteurs de résolution 1280×800 : 3 PC, un serveur P3D et FMGS qui produit la vue de face, un client P3D qui produit les 2 vues latérales, et un client FMGS qui gère l’ensemble des écrans et panels de l’avion ; cette solution est donc reconduite.
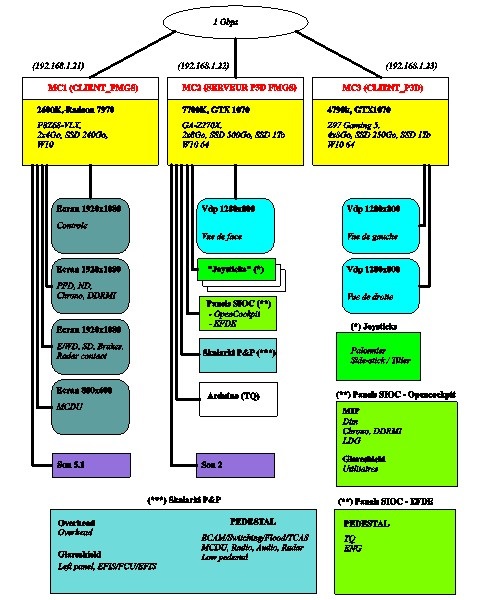
Le serveur P3D et FMGS “pilote” l’instance P3D du client, dont les 2 vues latérales sont synchronisées sur la vue de face via Wideview ; il gère également l’ensemble des entrées/sorties par l’intermédiaire de cartes Open-cockpit et “EFDE“, de simples cartes joystick, et les composants Skalarki, toutes connexions via USB.
Le client FMGS accueille la plupart des composants logiciels de A320 FMGS, et anime les 2 écrans du MIP : PFD/ND, EWD/SD, mais aussi les instruments de secours, l’indicateur de frein et la fenêtre de RadarContact (pour l’ATC).
2 SSD de 1 To viennent épauler l’équipement disque du serveur et du client P3D, pour accueillir les scènes pour P3D.
Les sons restent confiés aux 2 ensembles 2.0 (sur le serveur), et 5.1 (sur le client A320 FMGS).
1.2 - Les cartes d'entrée/sortie :
Les cartes d’entrées/sorties permettent de piloter les divers panels et instruments, sur lesquels on trouve switchs et boutons poussoirs, led, afficheurs 7 segments, potentiomètres ou capteurs hall ; le grand changement intervient à ce niveau :
– Dans la version 1 du simu, ce sont près d’une trentaine de cartes Open-cockpit qui sont nécessaires, regroupées en 4 sous-ensembles, OVH, glareshield, MIP, pedestal ; cette composition fonctionne parfaitement, mais sa maintenance est compliquée : près de 1200 connexions à gérer, des sous-ensembles du cockpit remplis de cartes et de câbles, et une certaine fragilité dès qu’il s’agit d’intervenir.
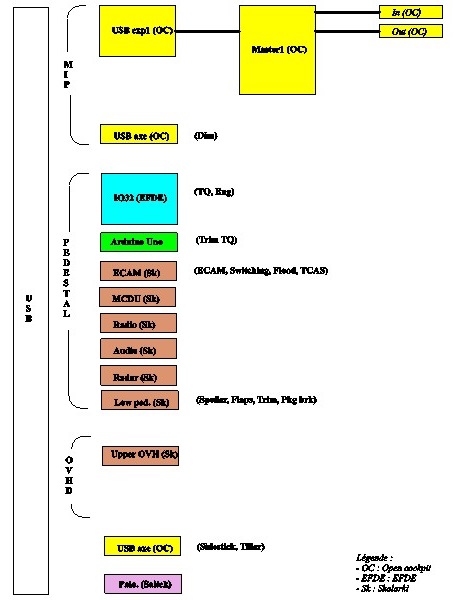
– Dans la version 2 du simu, tous les composants de l’OVH, du glareshield et du pedestal sont remplacés par du matériel Skalarki P&P, connexions via USB.
Il subsiste quelques composants qui me sont propres : throttle, tiller, sidestick, panel ENG, un panel utilitaire qui prendra place en partie droite du glareshield, les instruments de secours et le panel pour Radar-contact .
Ces composants sont gérés par une carte IO32 (EFDE) dans le pedestal, 4 cartes USB expansion + master + entrée + sortie (Open-cockpit) dans le MIP, et une carte joystick pour le sidestick et le tiller ; les 4 cartes Open-cokpit vont être remplacées par une carte IO32.
Au global, on obtient des sous-ensembles très allégés, au cablage simple (3 hub USB), et une vraie modularité : la dépose de l’OVH requiert moins de 2 mn, celle du glareshield moins d’une minute, …
1.3 - Les vidéo-projecteurs :
A ce jour, les 3 vidéo-projecteurs restent inchangés, résolution 1280×800 et throw-ration 0.35.
En projet, le remplacement de ces vidéo-projecteurs pour atteindre une résolution de 1920×1080, ce qui devient possible (en 2020) pour un coût acceptable ; l’étude est en cours, avec 2 difficultés potentielles :
– le throw-ratio des nouveaux projecteurs, tout en restant très spectaculaire, est néanmoins un peu supérieur, ce qui implique, pour conserver la même taille d’image, d’augmenter la distance vidéo-projecteur écran ; or sur mon simu, le fait que les projecteurs soient posés sur le toit limite cette distance, au risque de générer des zones d’ombre inaceptables.
– le fait de passer d’une résolution de 1280×800 à une résolution de 1920×1080 va forcément exiger plus de ressources au niveau des CPU et GPU (2 fois plus si on s’en tient au rapport des nombres de pixels ?) ; je ne suis pas certain d’être capable de maintenir l’indispensable niveau minimum de fps tout en conservant l’architecture à 3 PCs ?
2 - L'architecture des logiciels :
(voir également “architecture des logiciels“)
Je ne reprends pas ici dans le détail l’architecture, elle reste globalement identique à l’architecture de départ.
En revanche, de nombreuses évolutions ponctuelles :
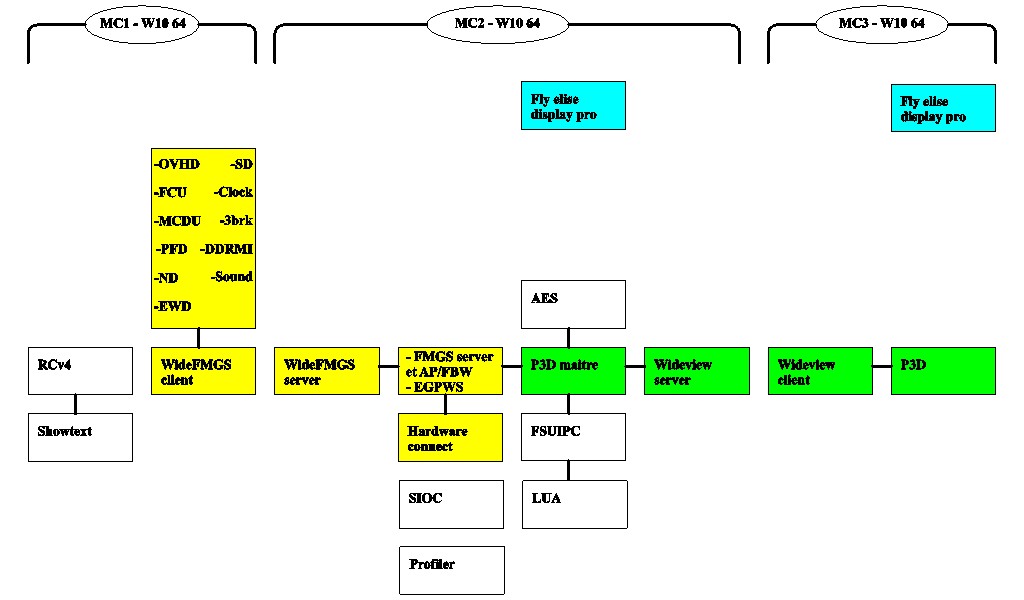
– Après quelques réticences, j’ai fini par migrer les 3 systèmes d’exploitations vers Windows 10 64 bits, un peu forcé par l’arrêt du support de Windows 7 ; ceci a bien évidement induit la nécessité d’opter pour la version 64 bits de quelques autres logiciels.
Au global, le résultat est satisfaisant malgré pas mal de soucis (en particulier au niveau du partage des données), dus aux modifications amenées par les versions majeures de windows (à date, version 2004), qui ne sont pas les mêmes selon l’édition (édition pro pour les 2 clients, et familiale pour le serveur).
– P3D (1 exemplaire sur le serveur, 1 exemplaire sur le client P3D) est désormais en version 4.5 ; je n’ai pas migré vers la version 5.0, qui de mon point de vue m’apporte peu, et est de surcroit payante.
– Mais, pour les scènes, j’ai opté pour une couverture complète de la France avec les scènes VFR de France VFR (ce qui m’a conduit à rajouter un ssd de 1 To sur le serveur et sur le client P3D).
– A320 FMGS est à date en version B53.3 ; ce logiciel gratuit et aux fonctionalités désormais très riches a atteint une belle maturité ; du à Jean-Luc Nitard (Jeehell), cette application est un véritable régal.
– SIOC (pilotage des cartes Open-cockpit et EFDE) est en version v5.
– Un nouveau logiciel est apparu, Profiler (pilotage des matériels Skalarki), en version 5.1 ; ce logiciel offre de fonctionnalités de configuration et test assez similaires à celles de SIOC.
– Wideview et Widetraffic (synchronisation des 2 instances de P3D) sont en version 64.
– ImmersiveDisplayPRO (projection sur écran courbe, 1 exemplaire sur le serveur, 1 exemplaire sur le client P3D) est nécessairement en version 4.3 ; attention, il n’y a plus d’alternative à Fly Elise, et la tarification a tendance à déraper …