Mais c’est sous la surface de l’eau que se trouve le gros de l’iceberg ! les systèmes.
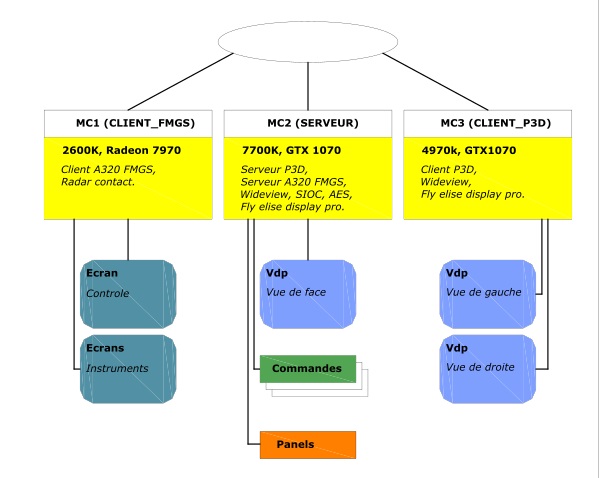
3 PC en réseau suffisent à faire voler l’avion, assurer l’interface avec le cockpit et produire 3 vues externes distinctes, avec un niveau de performance satisfaisant : fps supérieur à 30 dans tous les cas, sauf au sol dans les gros aéroports très chargés.
Au plan des matériels, les panels et instruments (essentiellement des switchs, des encodeurs, des potentiomètres, des afficheurs 7 segments et des leds) sont interfacés grace à des cartes IOcards qui assurent entrées et sorties digitales, entrées analogiques et sorties sur afficheurs 7 segments.
La gestion de ces cartes est confiée aux logiciels SIOC et FSUIPC.
Un Arduino a récemment fait son apparition sur le simu (pour le throttle), connection au simu via le trio logiciel C++, LUA, FSUIPC.
Au plan des logiciels, le vol de l’avion et l’affichage des 3 vues externes sont assurés par P3Dv4 (version 64 bits) pour atteindre un bon niveau de performance.
La navigation et les systèmes de l’avion sont confiés à l’excellent (et gratuit) A320 FMGS de Jeehell, nativement en liaison avec P3D et SIOC.
2 instances de P3D sont nécessaires pour la production des 3 vues externes, leur synchronisation est confiée à Wideview.
La mise en forme des vues pour affichage sur écran cylindrique est assurée par Fly elise display pro.